RoboRacer cars are model race cars with 1/10 scale. Some parts of the build are standardized and/or restricted to provide some degree of a fair playing field. However, hardware parts are also subject to engineering and improvements, where allowed.

RoboRacer cars are model race cars with 1/10 scale. Some parts of the build are standardized and/or restricted to provide some degree of a fair playing field. However, hardware parts are also subject to engineering and improvements, where allowed.
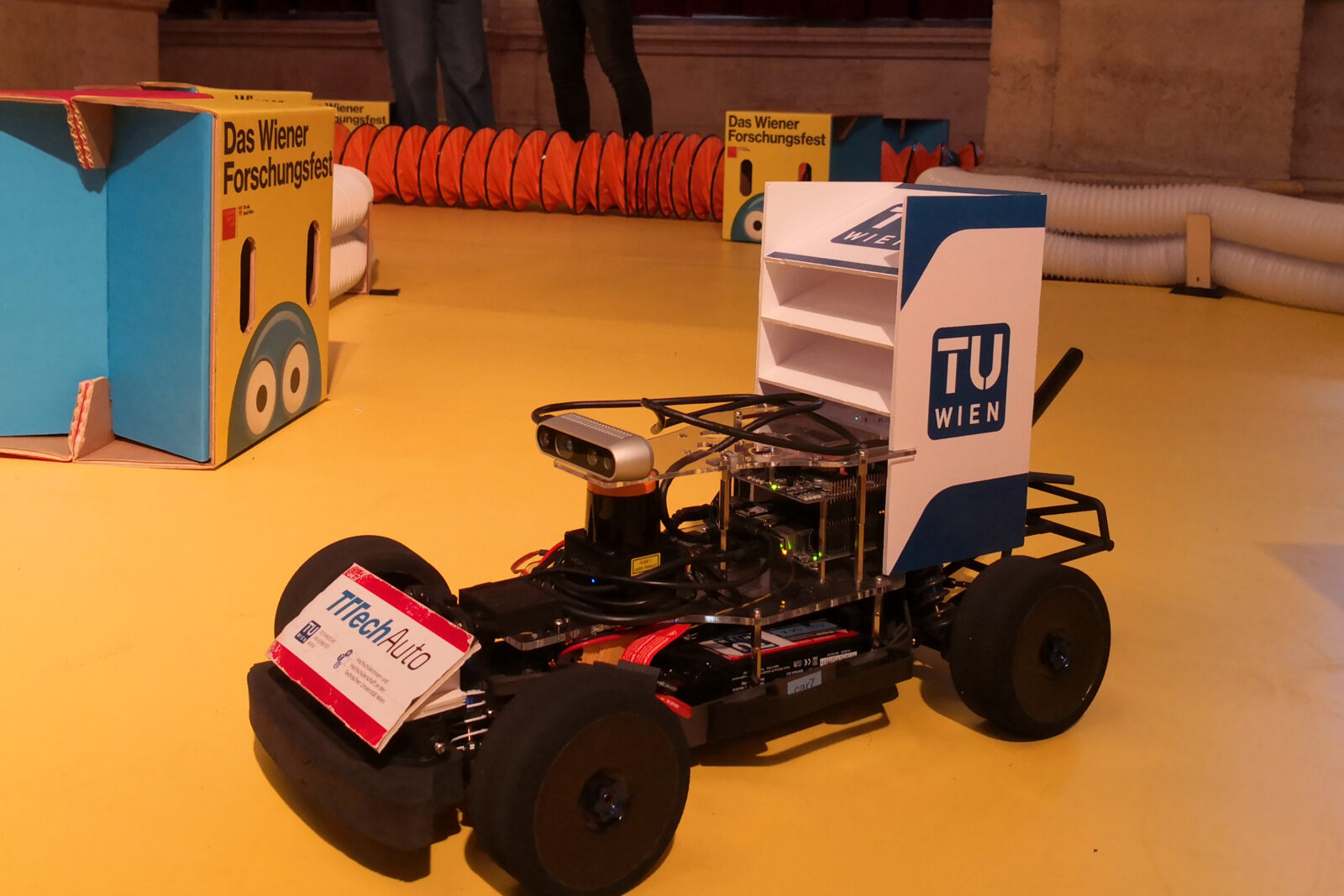
The cars first used at TU Wien were mainly based on the standardized bill of materials by the RoboRacer community. The main parts are the Hokuyo UST-10LX Lidar for environmental perception and the Nvidia Jetson TX2 embedded computing platform. The chassis is based on a Traxxas model Fiesta.
The acquisition of the first generation of cars for the underlying course on Autonomous Racing Cars was made possible through the BMWFW CPS/IoT-Ecosystem infrastructure award.
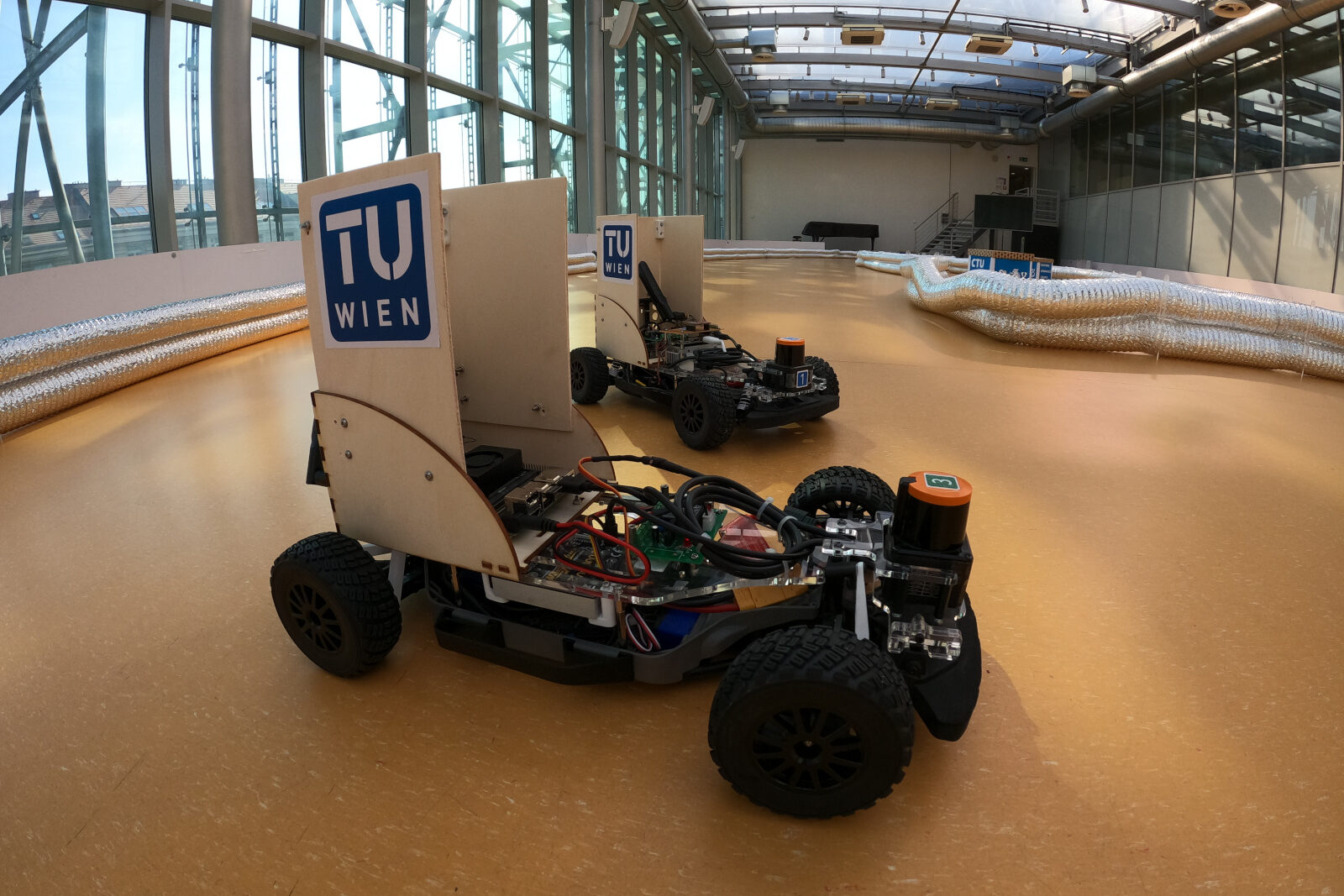
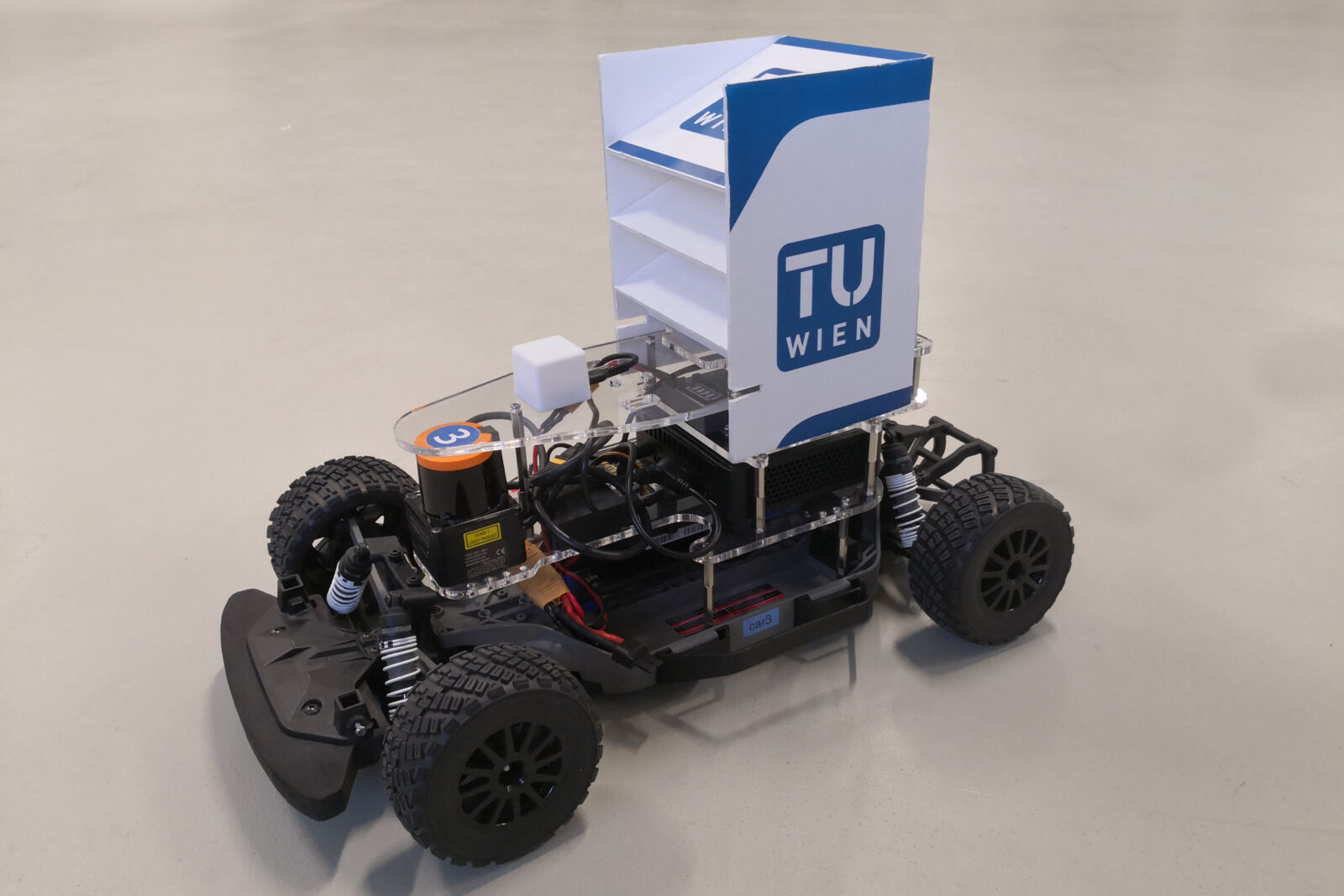
Throughout the lecture and also during race preparations, students came up with improvements on the car hardware. The embedded computing platform was upgraded to the Nvidia Jetson NX on this car generation. Furthermore the chassis was changed to a Traxxas model Slash with modified springs for optimized suspension. Several different tyre models are now in use to best match the respective floor surface. For various ongoing research, there are additional sensors placed on the car.
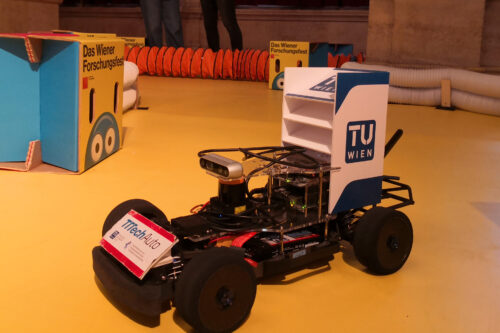
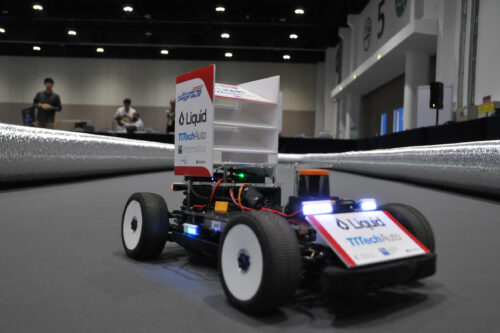
Improvements of software and racing algorithms made it necessary to upgrade the computing platform of the race car. It now is equipped with an Intel NUC, which provides the necessary computation power to run our racing algorithms and conduct various research experiments. Multicolor LEDs on every side of the car provide immediate state information about the internals of the executed control algorithm.
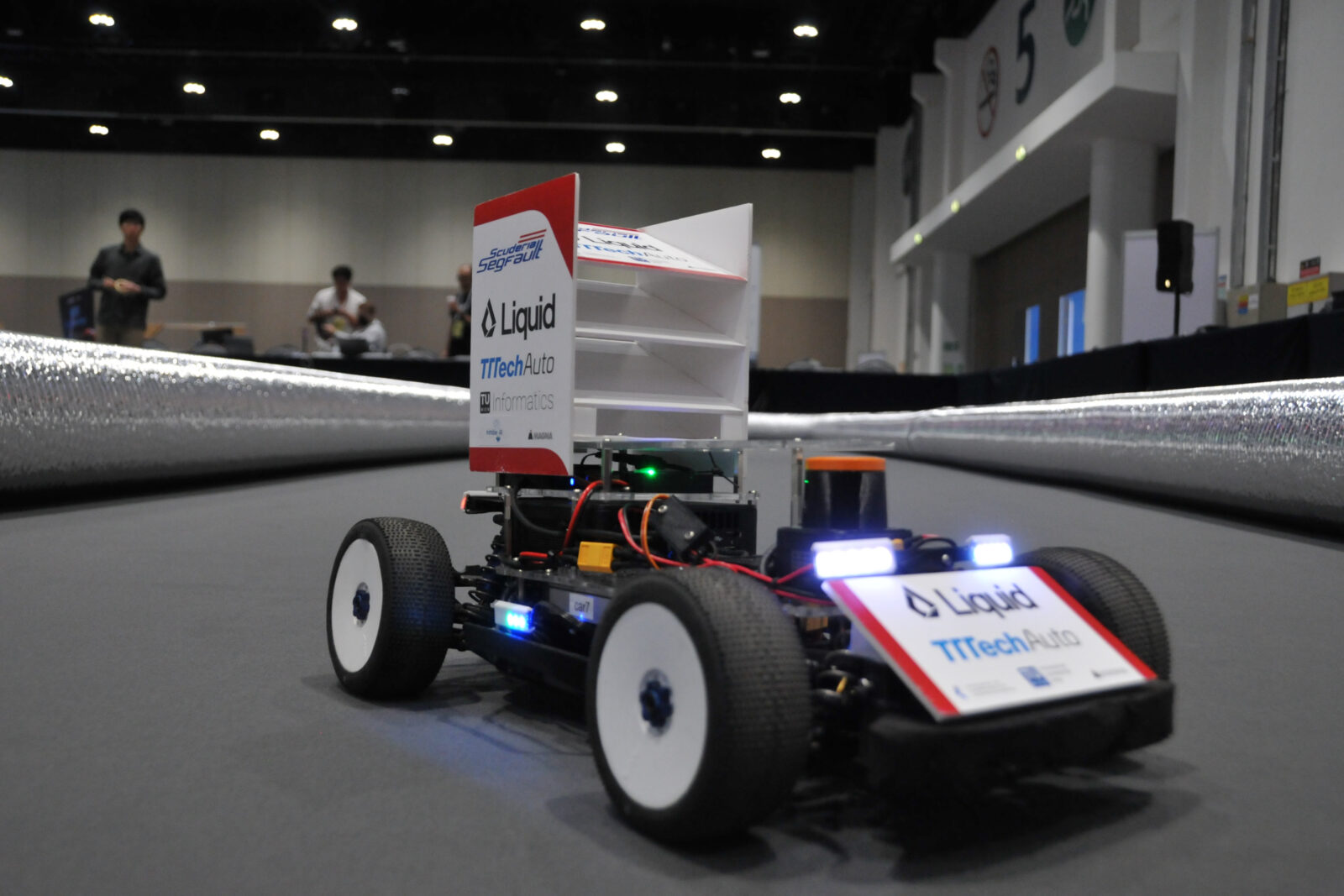
Thanks to the support of the faculty of informatics, we were able to update the racing car hardware for our Autonomous Racing Cars lecture. The new generation is equipped with an ASUS NUC 14 Pro, Intel Core Ultra 5, 32GB DDR5 RAM, and 1TB SSD. This provides the nessacary computation capabilities for the students to implement and run state-of-the-art algorithms. For improved state estimation and localization, the cars are upgraded with an IMU sensor PhidgetSpatial Precision 3/3/3 MOT0110_0. On top of the car there is a BlinkStick Square to provide visual feedback about the internal state of the car. A new DcDc power converter TEP 150-2412WI provides enough energy for all these components on the car.
Our team is constantly working on improving not only the software of the car, but also its hardware. Stay tuned for more information on our new race car generation!














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}