UAV-Based Coverage Measurements
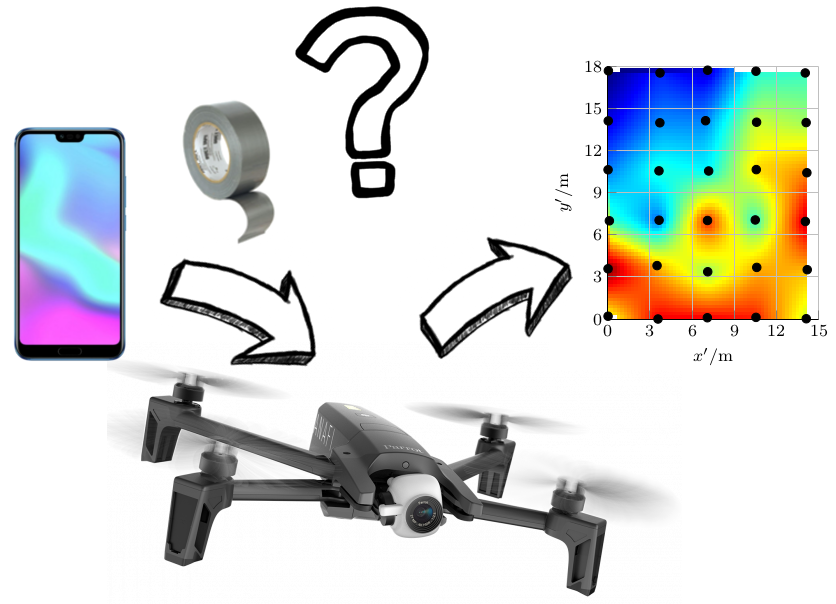
In recent years the demand for mobile coverage measurements has continuously increased. The two most important methods to determine mobile coverage are drive tests and simulation. Drive tests lack spatial density of measurements and simulations results have limited accuracy. To circumvent this problem we came up with the idea to perform UAV-based (Unmanned Areal Vehicle) measurements. This is sketched in Figure 1. A UE (User Equipment) or a more sophisticated device such as an SDR (Software Defined Radio) is attached to a drone to collect different KPI’s (Key Performance Indicators). After the area of interest was surveyed by the drone, KPI’s are merged with GPS data. This way a coverage map of the area can be reconstructed. The approach opens up a lot of new perspectives. Regions can be probed which were previously unreachable. For example the drone could investigate the airspace in front of the thirtieth floor of a sky scrapper, to estimate the coverage inside the building. It would also be easy to examine regions which are hardly accessible by ground based vehicles, such as mountain ranges or any off-road area.
To automatize UAV-based mobile coverage measurements we have built custom drones (Figure 2) and developed an application based on QGroundControl (http://qgroundcontrol.com/). The application creates a flight path according to a defined measurement scenario (Figure 3). The flight path automatically updates as the measurement progress increases. This substantially facilitates the measurement process. The application is freely available. In the case we have sparked your interest, have a look at the introductory video and the Linux AppImage here. The source code can be found here.